ADAS-CIS|安森美AR0821两帧150dB是如何练成的?
引言
“在上篇文章中,我们根据索尼发表的IEEE论文,介绍了索尼车载CIS的大小Pixel的HDR技术,讲述了其Pixel架构、优势。今天,我们再来介绍安森美在2021年于IEEE发布的AR0821架构的论文,我们将介绍安森美是如何在pixel size为2.1um的情况下,动态范围是如何做到单次曝光110dB,两次曝光达到150dB。”
1 Introduction
图像传感器扩展动态范围最常见技术是多重曝光方法,将具有不同积分时间的图像合成一个HDR图像,但此方法比较容易造成运动模糊,而且LFM无法保证。
另外在上篇文章中我们介绍了SONY的SubPixel-HDR技术,索尼使用SubPixel-HDR技术,在3帧的合成的情况下,可以在保证LFM的前提下做到110dB。
虽然,SubPixel架构可以有效地扩展Sensor的动态范围,但是受制于像素间距以及工艺影响,当pixel size越做越小的时候,其‘小pixel’则会越来越难做。
因此,更优选的方法是在单个像素在积分时间内完成曝光,然后使动态范围最大化,另外在自然光源下,有LFM的工况下,110 dB几乎涵盖了所有的ADAS使用情况。因此。我们尽力追求单个Pixel的动态范围在一帧曝光的情况下做到110dB。
今天,我们继续从安森美发布的IEEE的技术论文出发,来讲解车载Sensor厂商另外一个专注于“技术”的巨头安森美最新的pixel架构技术,论文DOI号可以关注我公众号,然后私信《安森美AR0821论文》获取。
2 ‘扩展电容+DCG+多曝光’ HDR
2.1 Pixel架构
Onsemi论文中给出的AR0821的Pixel架构如下所示:
![]()
上图呈现的像素组合为DCG+overflow电容器,单次曝光可以输出三帧图像,这三张图像分别为:
HCG(DCG and CAP CLOSED)
MCG(DCG ON and CAP CLOSED)
LCG(DCG and CAP ON)
其中,高密度MiM电容器相对上一代的低增益平面MiM电容器可用性增加。尽管像素间距减小,但FWC(满井容量)增加了近4倍,达到600 ke-。满井的增加最直接的结果就是单次曝光DR相对之前增加14 dB,同时增加低增益电容降低了低增益读取时的读取噪声。
2.2 Pixel工作时序
图像曝光、采样时序如下图所示:
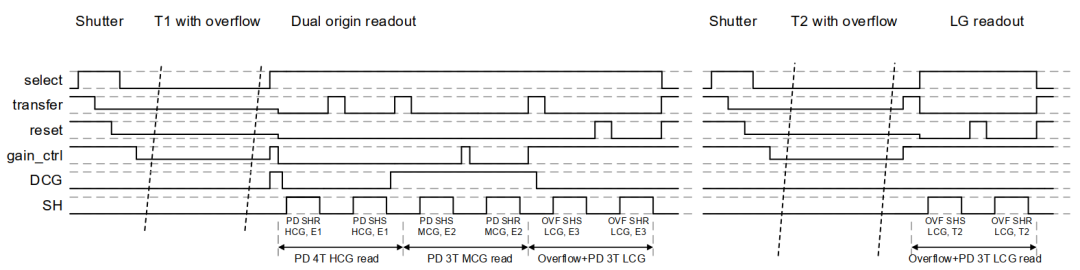
可以看出当Sensor工作模式为全HDR合成时,整体曝光分为T1(长曝光)+T2(短曝光)。
在T1周期内分为三帧进行采样,HCG+MCG+LCG,动态范围可以达到110dB,信号位宽为20bit。
在T2周期内,使用LCG模式进行依次短曝光,T1/T2的曝光比为100,换算成bit为6.64bit,传感器的输出bit从20bit到26bit,动态范围由110dB扩展到了150dB。
论文中给出sensor的关键指标如下所示:

可以看出,单帧模式下sensor最快帧率可以达到110dB@60fps。加入T2之后sensor帧率有所下降,可以达到150dB@45fps。
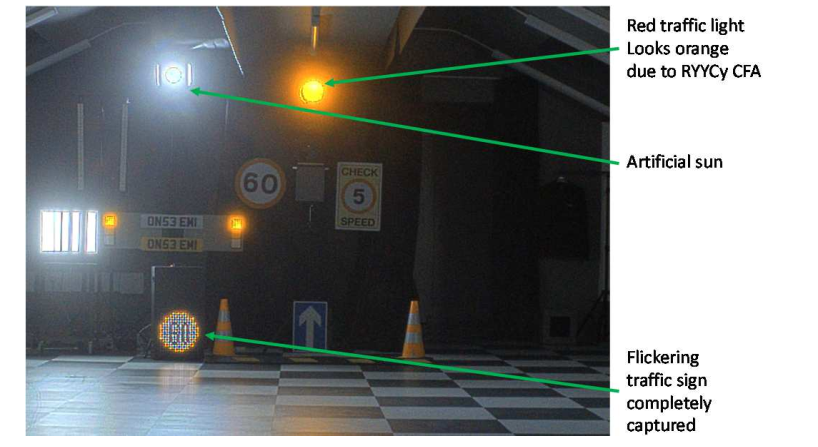
sensor的实拍图如下所示,场景仿真图中给出了ADAS场景中的几个关键场景,如太阳、红绿灯、交通指示灯等场景,可以看出sensor具有较好的动态范围以及LED闪烁抑制功能。
2.3 Pixel性能对比
论文最后,Onsemi还给出了sensor的SNR曲线以及当前工作和索尼IMX490的关键指标的对比。SNR曲线如下所示:
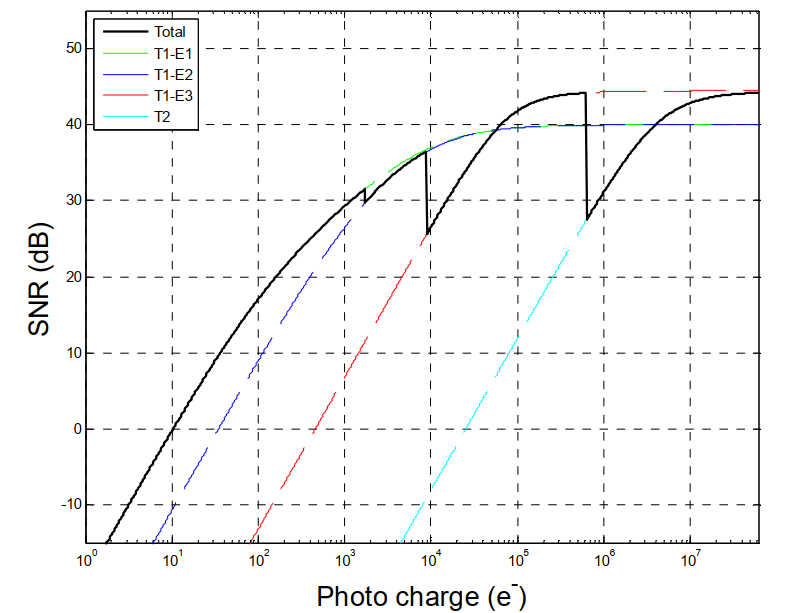
可以看出,Sensor的SNR最大可以做到45dB左右。最大SNR Drop为T1 LCG与T2 LCG交接处,最大可达7dB左右。
与IMX490指标对比如下所示:(虽然论文没有明说...但只要是做车载相机的应该都懂...)
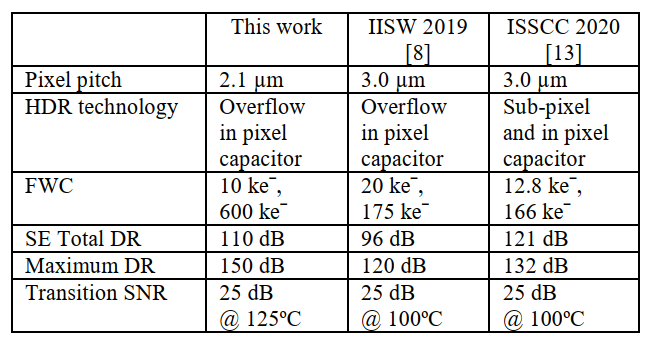
当然孰优孰劣,论文参数只能说明一方面。在实际工程中还要考虑镜头、成本以及国家芯片限制政策各方面因素进行综合考虑。
最后附上一张论文中AR0821的实拍图:

3 结束语
今天我们为大家介绍了安森美在IEEE中发表的AR0821的技术论文,为大家介绍了其HDR的实现原理与技术架构,希望可以给您带来对于传感器的更深的认知,喜欢的同学可以进行朋友圈分享以及文章在看。
如果您对自动驾驶感兴趣,可以关注我的公众号(网页关于我中获取),当然有想了解的话题,也可以私信我,我们将对各位看官感兴趣的话题进行技术分享。
好了今天就到这里,想看原论文的同学可以公众号私信我进行获取。
如果您对ADAS感兴趣,欢迎关注我的公众号、知乎、CSDN等,同时发表文章中使用源码会在我的GitHub进行开源(网页About Me中有公众号、Github等信息)