ADAS-Lidar|索尼车载IMX459激光雷达芯片论文解析
引言
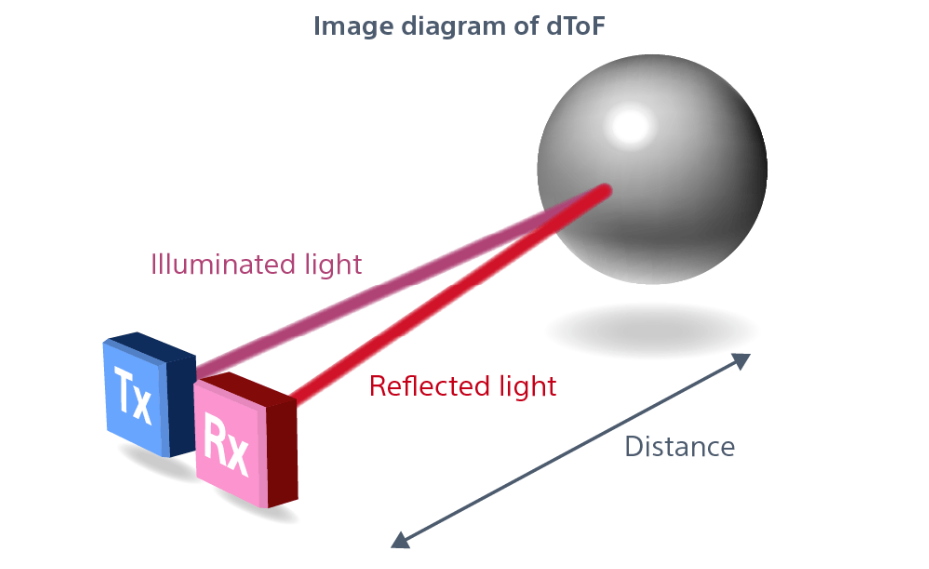
之前我们在《ADAS-激光雷原理概述》中简要介绍了基于dToF的Lidar的组成、原理以及发展趋势等。今天,我们将基于Sony首款激光雷达SPAD芯片IMX459的IEEE论文,为大家介绍IMX459芯片以及基于该芯片的Lidar Demo的基本框架。
索尼官网对IMX459的介绍链接: SPAD Depth Sensor for Automotive LiDAR Applications
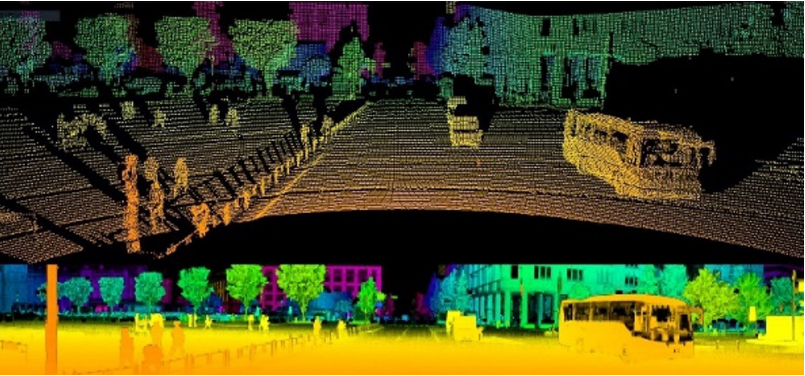
Demo点云图像:
1. Introduction
目前,LiDAR(Light Detection And Ranging)传感器在自动驾驶以及高阶辅助驾驶应用中有了极大地应用发展,它们被用于高精度测距、重建物体外形以及道路识别等各种应用。
无论白天, 这些Lidar传感器在不损失精度的前提下可以获取极好的测量效果。过去的时间里,基于时间相关单光子计数TCSPC(Time-Correlated Single Photon Counting)以及数字信号处理器DSP(Digital Single Processing)已经实现了100m范围的ToF测距Sensor。背景噪声去除技术已经被用于提高传感器的信噪比SNR,物体的检测距离可以达到6Km。
基于单光子雪崩二极管SPAD(Single Photon Avalanche Diode)架构实现了每个pixel级别的直方图统计、时间数字转换以及信号处理。一些ToF已经可以达到较高的分辨率,如1200x900像素。随着使用2D-SPAD阵列实现的高精度固态激光雷达的迫切需求,我们提出了一个SPAD直接飞行时间(dToF)深度传感器,以实现300m远距离距离测量并且满足了在-40~125℃下的自动驾驶器件等级。
这个基于微机电系统(MEMS)的SPAD激光雷达可以实现在10%反射率的情况下实现150m的距离测量,精度为0.1%,在反射率为95%的情况下,可以实现200m的目标距离测量,精度为0.1%。
本文提出了背照-堆叠式的SPAD dToF深度传感器,在传感器上部署了无源抑制和再充电(PQR)前端电路、TCSPC和片上DSP。在自然光为117klux的条件下,这个基于微机电系统的SPAD Lidar测量范围可达200m,分辨率为168*63,帧率为20fps。
2 Lidar Demo系统架构
Lidar传感器基于微机电系统SPAD Lidar的概念,整体系统细节如下所示:
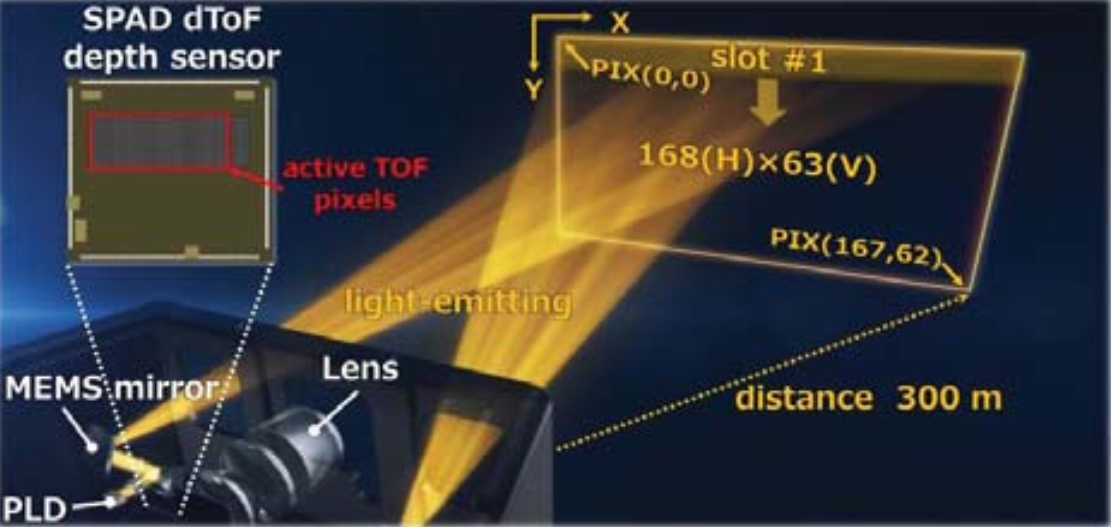
雷达系统主要有三部分组成:
- 一个脉冲激光发射器
- MEMS微振镜
- SPAD dToF传感器
激光发射器的激光波段为905nm,4.5n是的激光脉冲,峰值输出功率可达45W。在1D扫描的方式下,MEMS微振镜被用于引导激光束。
基于MEMS的SPAD扫描激光雷达dToF深度传感器可以达到25.2°×9.45°视场FOV,角度分辨率为0.15°,最远测量距离为300米。在这种方法中,MEMS反射镜振荡而激光垂直扫描。垂直ToF宏像素的SPAD阵列(MP)用相同的激光脉冲并行扫描所有63个垂直ToF MP,同时192个ToF宏块中的一个用于168个水平活动ToF MP。扫描速度非常高,导致以20帧/s的速度进行168×63MP的全扫描。
备注:Sensor全分辨率189x600, 3x3bining,最后分辨率63x200,最终active区域分辨率为63x192(猜测边缘8个应该是用于测环境光or单纯作为padding像素)
3 dToF芯片架构
3.1 芯片SPAD阵列
芯片架构包含189x600的SPAD阵列,包括行列驱动器、置信度检测电路CDCS,TDCS以及DSP等,如下图所示:
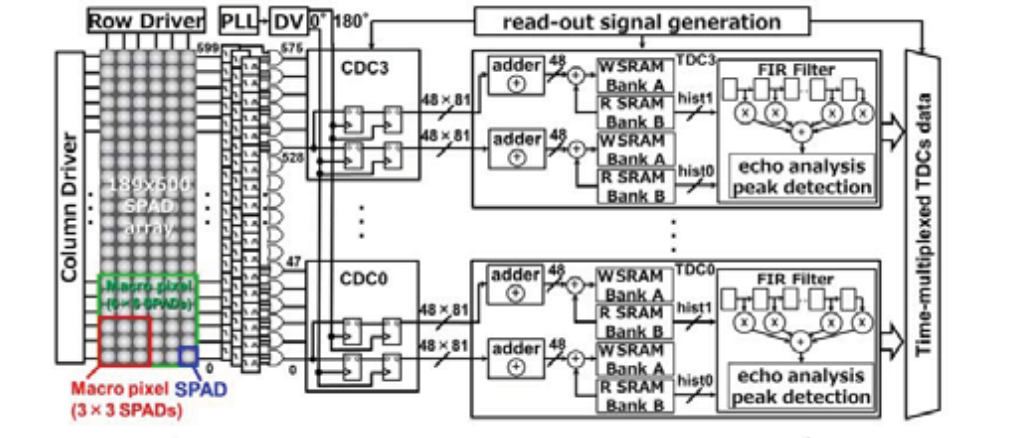
该传感器由垂直方向189个SPAD的光接收区和水平方向上的600个SPAD组成。可选3×3 SPAD或6×6 SPAD的配置构成一个宏像素,宏像素是芯片的最小分辨率单位。
信号处理流程从CDCs到直方图采集(ACQ)、回波分析(EA)和峰值检测(PD),每个相位包括两组电路。每个电路在500MHz时钟的相反相位上处理信号,即时钟上升以及下降沿均处理信号,从而在每次测量中实现1GHz的有效采样率每隔一个阶段发生一次。ACQ之后,对两相的数据进行交替地积分,然后以250MHz单相的处理数据。
3.2 输出模式
芯片共有三种输出模式:
- 直方图模式:可以测量距离范围内的直方图数据
- 回波模式:最多5个回波的直方图数据
- 测距模式:最多5个回波的多回波分析信息数据
芯片的上采样使用FIR滤波器,可以将精度提高到7.5厘米。
传感器有两种操作模式:
- 线性:active 区域是固定的
- 阵列模式:每个位置选择读出行
3.3 工作时序
此传感器的同步时序由同步信号F_SYNC、S_SYNC、PRE_TRG和TRG_I等控制。同步信号时序如下图所示:
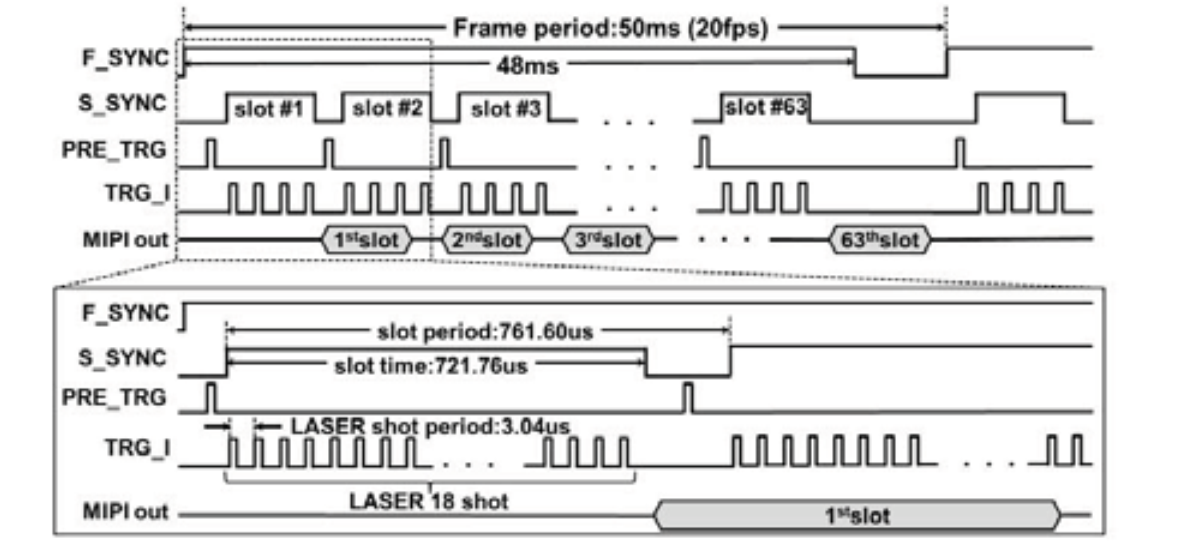
F_SYNC为50ms周期,分为S_ SYNC 63个时隙,每个时隙761.60μs。S_SYNC 63时隙用于生成63个ToF图像的垂直扫描的时段。在当前是环境背景光下,ACQ定时信号PRE_TRG被输入到该传感器,并且带有BG光的ACQ数据会被输出。采集的BG光的平均值和方差值输出给每个像素作为输出格式中的共同模式信息。这种共同模式被用于作为减去直方图ACQ中的BG光分量的值(本质就是背景光)。
3.3 芯片架构
高分辨率SPAD dTOF深度传感器的框图如下图所示:
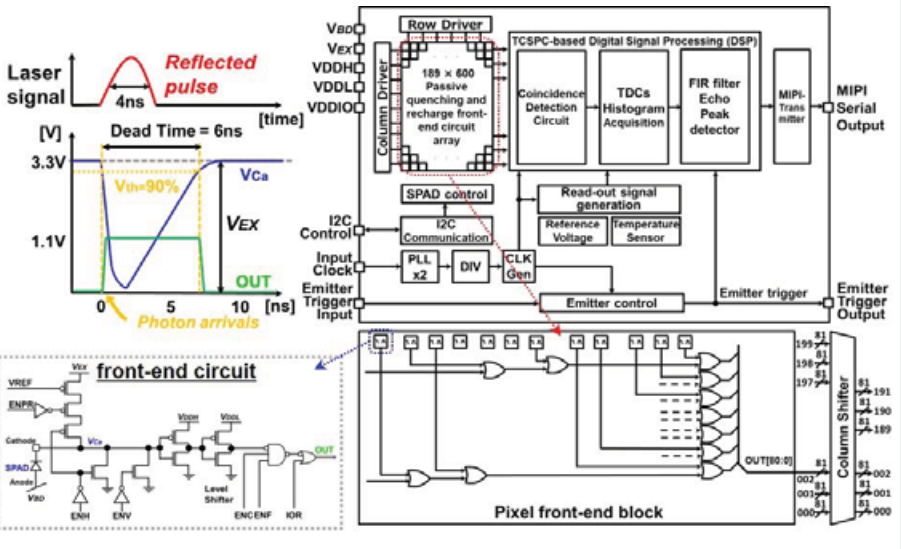
PQR前端电路由专用列和行控制驱动电路组成,物体反射的激光脉冲由光学器件聚焦并通过SPAD阵列进行检测。接收到的光子信号通过阴极高速放大。PQR前端电路中完成高速的模数转换,最后数据被TDC输出。
在数据读出器件,来自列SPAD的信号在水平方向上按照81b对齐。最后,列移位器在200个宏像素中选择192个进行读取。在室温下,使用PQR读出电路,死区时间可以缩减为6ns。
4 芯片性能
4.1 基本SPEC&工艺
芯片的基本参数如下所示:
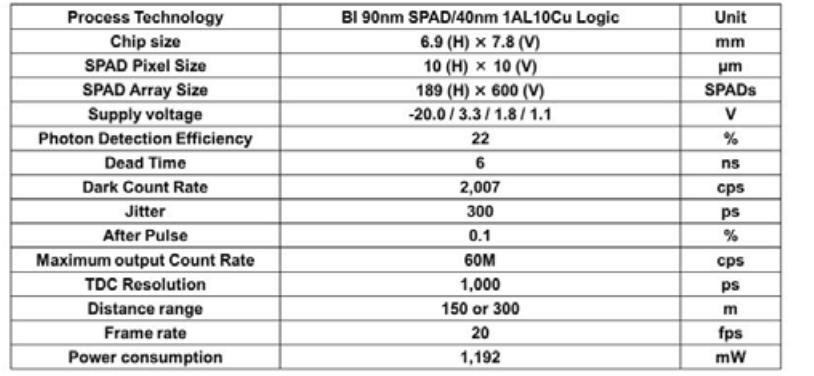
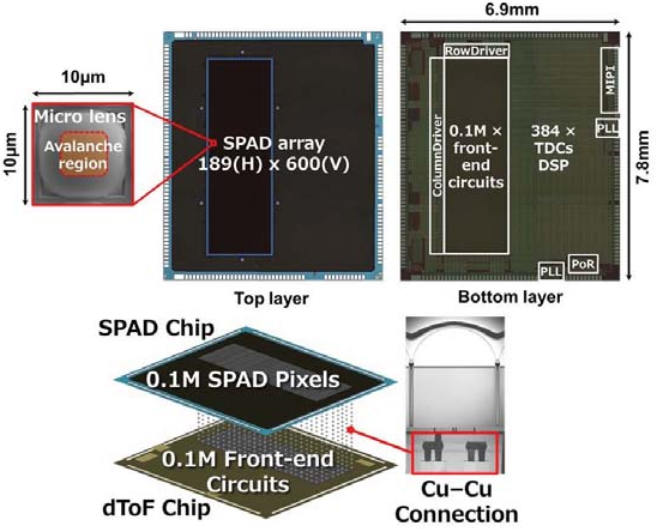
芯片使用堆叠式工艺,顶部芯片使用90nm的背照式工艺实现,完成基于CMOS的SPAD。底部芯片使用40nm 1AI-10cu工艺,负责完成SPAD的信号逻辑处理。整个pixel数量为100000个SPAD像素(189(H)x600(V)),包含没有使用的SPAD。最终整个芯片die如下所示:
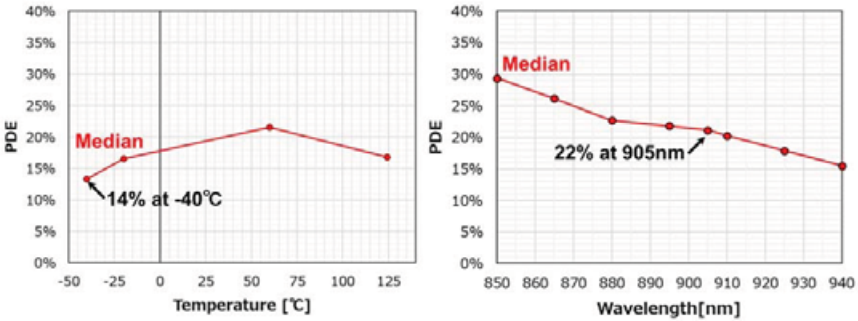
SPAD的像素尺寸为10um,每个像素包含一个微透镜。在波长为905nm的光源下,SPAD的峰值光子检测效率(PDE)可以达到22%。在-40℃的条件下,PDE缩减14%,如下图所示:
关键性能如下:
- 测量死区时间为6ns;
- DCR背景计数时间计数在60℃和125℃的情况下,分别为2kcps以及600kcps;
- 在200μW/cm^2的光强下,60Mcps即可达到饱和;
- 在117klux的光照下,可探测95%反射率的物体,芯片测量距离可达200m,精度30cm;
4.2 Demo效果
下图显示了基于MEMS的SPAD LiDAR测量的3D点云,俯视投影、强度图像、BG光无源图像和2D深度图像。
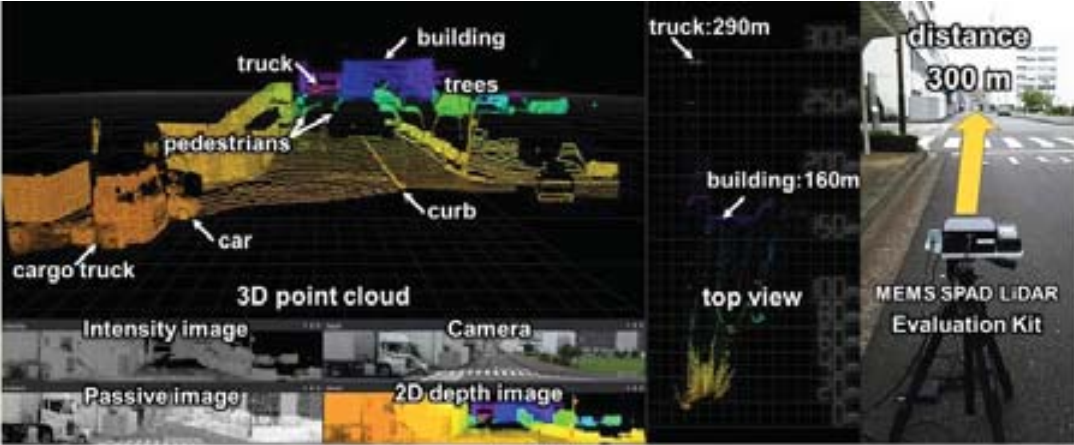
行人、汽车、路缘石、树木和建筑物等各种物体都可以通过SPAD dToF深度传感器检测到。同时传感器提供有效的检测距离范围为0到300m。
下图显示了在对于117klux阳光条件下,激光雷达系统对于10%反射率目标在0至150米处的测量结果:
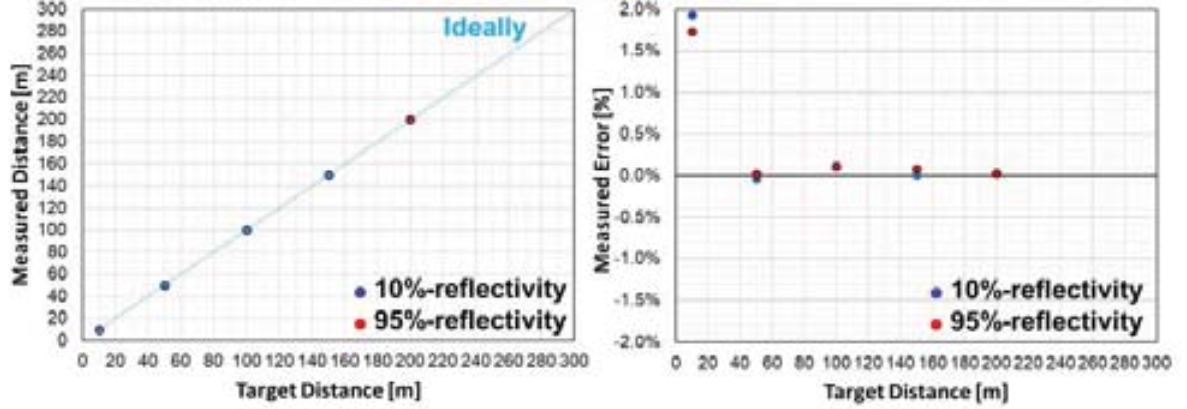
这表明在117klux阳光下,95%反射率目标在150至200米处距离测量误差在150m处精度<15cm,在200m处精度<30cm。
4.3 其他工作对比
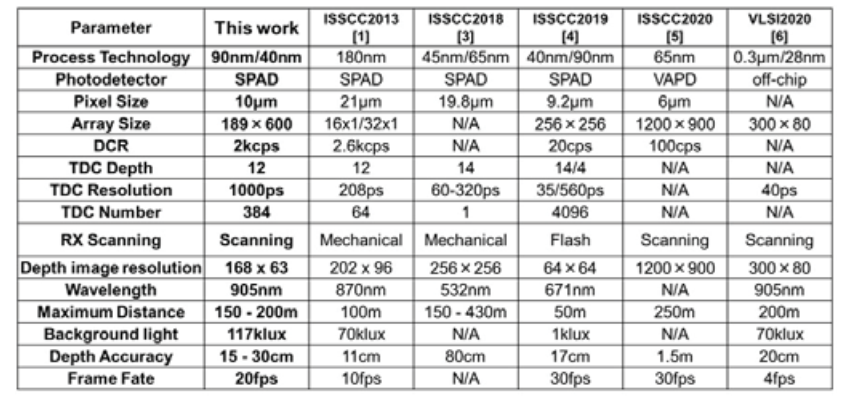
与最近发布的最先进技术进行比较,设备和激光雷达系统对比如下:
传感器捕获的189x600 SPAD的背景光图像如下所示:

5 结束语
今天我们给大家介绍了Sony的基于SPAD dToF芯片论文,讲解了芯片基本架构、性能指标等,希望今天的介绍以及科普可以帮助您更加深入的了解车载激光雷达,对您的工作有所帮助。
如果您对ADAS感兴趣,欢迎关注我的公众号、知乎、CSDN等,同时发表文章中使用源码会在我的GitHub进行开源(网页About Me中有公众号、Github等信息)