ADAS-CIS|三星车载DRAM+大小像素HDR技术解析
引言
在之前的文章中,我们根据索尼和安森美发表的IEEE论文,分别介绍了索尼车载CIS的大小Pixel的HDR技术以及安森美Lofic HDR技术,并分别讲述了各自的Pixel架构、优势。
今天,我们再来介绍三星车载团队在2022年于IEEE发布的1H1架构的论文,我们将介绍1H1是如何在pixel size为2.1um的情况下,通过使用亚像素结构和每个像素的高容量DRAM电容器,在85°C时,单次曝光动态范围达到140dB且支持LED闪烁缓解。即使电容非常高,小型光电二极管的双转换增益电路使Sensor的信噪比在105°C时可以保持在23dB以上。同时,全深度深沟槽隔离即使在极高照度的条件下也能防止像素之间的电串扰,并在0.83e-的低随机噪声下实现高转换增益。

1. Introduction
动态范围(DR)一直是CMOS图像传感器(CIS)在汽车应用中的主要要求。高动态范围(HDR)图像提高了在高级驾驶辅助系统(ADAS)所需的所有光线条件下对物体、障碍物和交通信号的精确感知。多重曝光是CIS中使用的HDR方法之一,但图像的不同采样时间会在图像合成过程中导致运动伪影。此外,交通信号灯或车辆中使用的发光二极管(LED)会闪烁,导致信号检测或物体识别出现错误的可能性很高。
汽车应用中更优选的方法是单次曝光法,通过引入横向溢出积分电容器(LOFIC)来最大化DR。由于曝光时间比LED闪烁周期长,LED闪烁减轻(LFM),而由于长曝光时间而产生的多余信号电荷存储在LOFIC中,从而扩展DR。亚像素结构也是扩展单次曝光DR的有效方法,将高灵敏度和低灵敏度光电二极管与LOFIC相结合。然而,单次曝光DR仍接近120dB,需要额外的多次曝光或自动曝光控制来补偿不足的DR。此外,由于像素内电容器的面积有限,像素收缩会导致DR退化。
在这项工作中,我们提出了一个像素的原型来解决这些问题。该像素设计用于在单次曝光中扩展DR,改善运动伪影并支持LFM。像素大小为2.1μm,测试芯片的分辨率为830万像素。该像素采用子像素结构、全深度深沟槽隔离(F-DTI)和用于LOFIC的高容量DRAM电容器。
今天,我们继续从三星发布的IEEE的技术论文出发,来讲解新进车载Sensor厂商三星的最新的pixel架构技术。
2. Sensor与像素架构
2.1 Pixel架构
Samsung论文中给出的Pixel架构如下所示:
![]()
上图显示了1H1的像素的示意图,像素由两个光电二极管(PD)、四个浮动扩散区(FD)、九个晶体管和一个DRAM电容器组成。大的PD(LPD)可以在黑暗条件下以高灵敏度集成大量光子,而小的PD(SPD)即使在明亮条件下也由于低灵敏度而不容易饱和。DRG晶体管控制LPD以支持双转换增益(DCG)读出。SW晶体管选择性地将SPD的FD3节点连接到源极跟随器(SF)放大器。TSW晶体管控制SPD以在DCG读出中操作。DSW晶体管缩短了电容器的放电路径,减少了DRAM电容器的稳定时间。
2.2 Pixel垂直结构
下图显示了F-DTI像素的垂直结构。
![]()
LPD和SPD具有不同尺寸的光电二极管和微透镜,具有不同的灵敏度。PD之间的F-DTI电隔离并减少光学串扰。电隔离是至关重要的,因为LPD的多余电荷应该干净地排放到VDD,在非常高的照度条件下不会影响SPD信号。它还有助于确保全井产能(FWC)。掩埋的PD通过P阱与硅表面的其他元件(例如像素晶体管或FD)电隔离,并且LPD的高转换增益是可能的,而没有任何FWC退化。
另外,全局快门CIS采用了高容量DRAM电容器以在电压域存储信号。我们引入DRAM电容器作为LOFIC到电荷域。DRAM电容器由每个像素63个凹孔组成。每个孔的尺寸为100nm,并且具有电介质ZrO/AlO多层膜的约5fF的电容。由此产生的电容高达280fF,存储的电荷超过每像素1.8Me-。在DRAM电容器的有效25Me-FVC下,LPD和SPD之间的灵敏度比为14:1。
3. 像素操作
下图分别显示了Sensor像素的时序图,其中LPD-HCG(R1-S1)和SPD-HCG(R3-S3)操作相关双采样,而LPD-LCG(S2-R2)和SPD-LCG(S4-R4)操作非相关双采样。
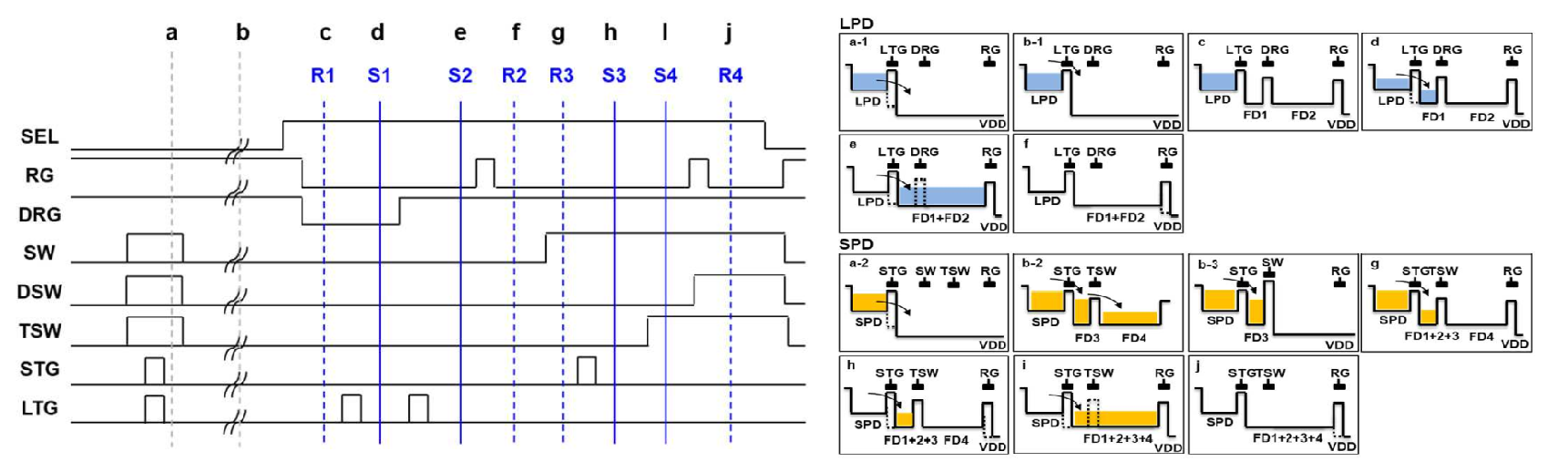
对于LPD:(a-1)通过快门操作重置LPD。(b-1)在积分时间期间在每个光电二极管中产生信号电子。在LPD被填充之后,多余的电子被排放到VDD而不发生晕染。(c) FD1和FD2被复位,LPD-HCG在RG/DRG关断时首先被采样(R1)。然后(d)在LTG操作期间信号电子转移到FD1,信号(S1)电平被采样。(e) 由于FD1的小电容,在DRG接通的LPD-LCG模式期间,LPD中的过量的信号电子随后转移到FD1+FD2。RG操作的kTC噪声仍然存在,但转换时的噪声电平远小于信号电平,维持了超过25dB的相当高的SNR。
对于SPD:(a-2)SPD通过快门操作重置。(b-2)来自SPD的多余电子可以依次溢出到连接到DRAM电容器的FD3和FD4,然后存储。(b-3)由于SW的关断电压低于TSW,所以溢出的电子不被排放到VDD,直到DRAM电容器完全充满信号电子为止。(g) SW开关接通,FD3连接到FD1+FD2。SPD-HCG的复位电平被采样(R3),并且SPD中的(h)信号被传送到FD1+FD2+FD3。TSW被关断,FD3和FD4被分别采样(S3),使得能够在SPD下进行HCG操作。(i) 通过接通TSW开关,FD4连接到FD1+FD2+FD3,然后对信号电平(S4)进行采样。(j) 由于DRAM电容器中可以存储大量电荷,DSW开关通过缩短DRAM电容的放电路径来帮助快速放电,并且对SPD-LCG的复位电平(R4)进行采样。
4 工作总结与其它工作对比
4.1 芯片指标
下图总结了我们测试芯片的像素性能(可以看出和三星官网1H1介绍给出的规格一致,基本确定1H1):
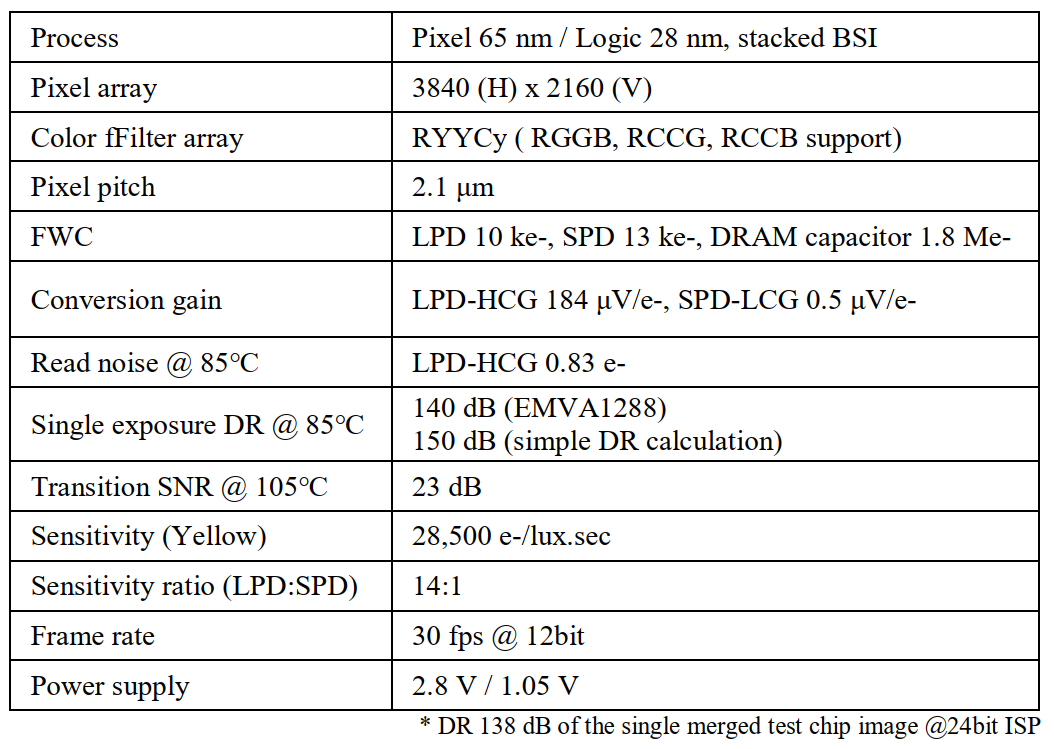
DRAM电容器的FWC为1.8Me-,这个指标相较于其他竞品sensor有较大的提高。另外,根据EMVA标准1288,在Tj=85°C时可实现140dB的单次曝光DR。由于LPD-HCG的高CG,暗随机噪声为0.83e-,基于简单的DR计算,导致单次曝光DR为150dB。
4.2 SNR性能
下图显示了105°C下由4种类型的信号组成的合成SNR曲线。
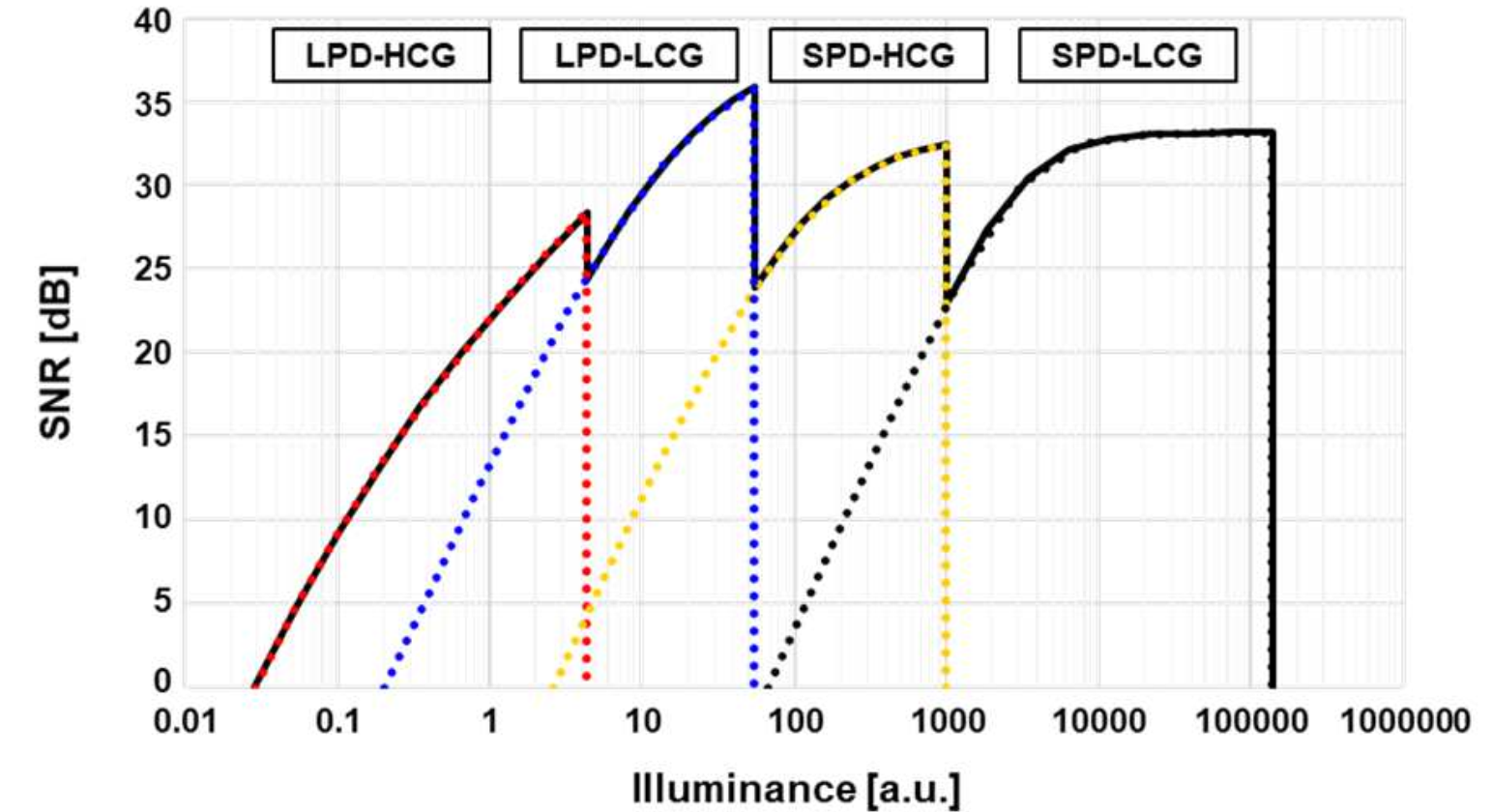
SNR在每个过渡点都会下降,但保持在23dB以上。由于DRAM电容器导致的非常低的CG降低了随机噪声,导致SPD的过渡中严重的SNR下降。使用TSW的DCG实现了高转换增益,以减少随机噪声并提高转换SNR。SPD-LCG的转换SNR主要受随机噪声和kTC噪声的影响,这是由于非常低的转换增益,而不是FD暗信号不均匀性(DSNU)。SPD-HCG的高FWC是通过将转变点转移到更高照度条件来提高SPD-LCG的转变SNR的最有效的方式。因此,我们将FWC增加到比LPD大13keSPD。
4.3 实拍图像对比
下图显示了在户外阳光带有LED信号下拍摄的HDR图像与传统商业相机对比:
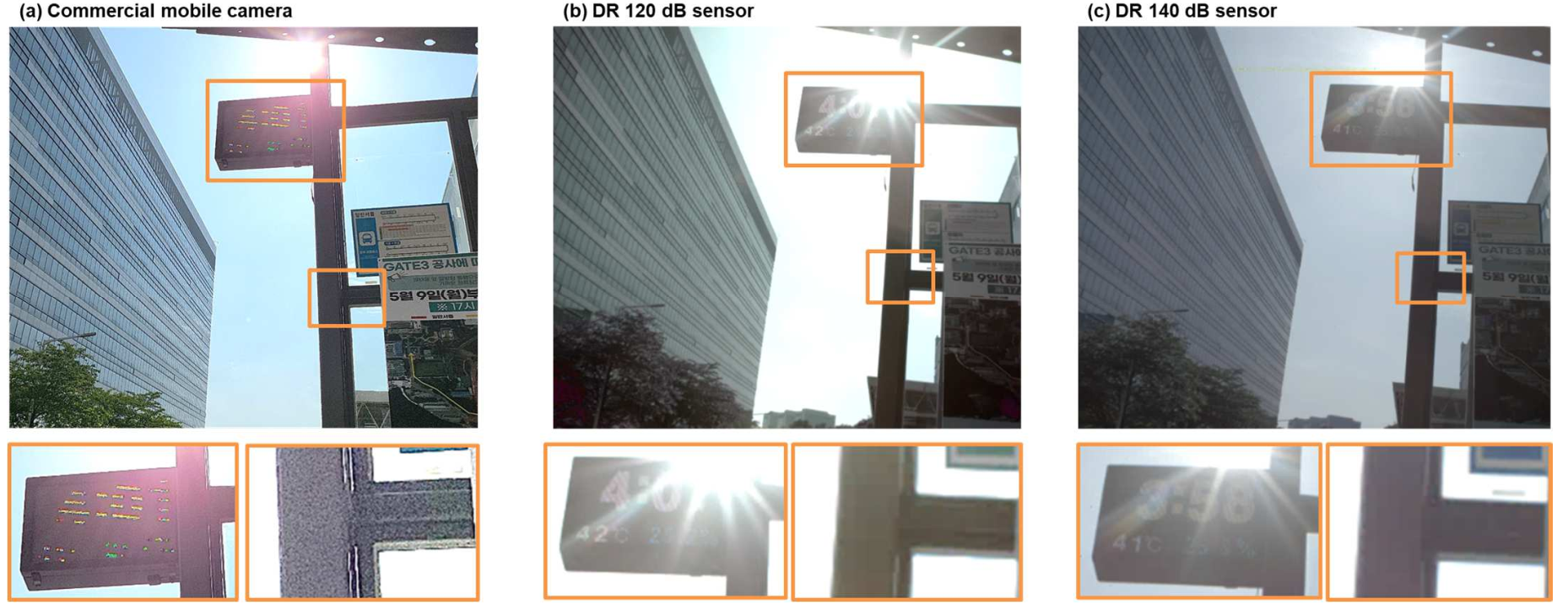
上图分别来自传统移动相机、120dB DR传感器和140dB DR传感器。由于曝光时间短,LED闪烁,来自移动相机的图像无法检测到来自LED的信息。然而,120dB和140dB DR传感器的单次曝光图像可以识别LED信号,并且暗区的噪声比移动相机的噪声小得多。来自140dB DR传感器的图像即使在阳光直射下也显示出更高的饱和点,并且可以区分太阳附近的LED信号。而来自120dB DR传感器中的图像由于早期饱和而丢失了一些LED信息。这意味着在非常强的照明环境中,甚至超过120dB DR,仍然需要LFM,以不丢失LED的对象、信号或信息。
4.4 其他工作对比
下表显示了本文工作与其他工作的性能比较:
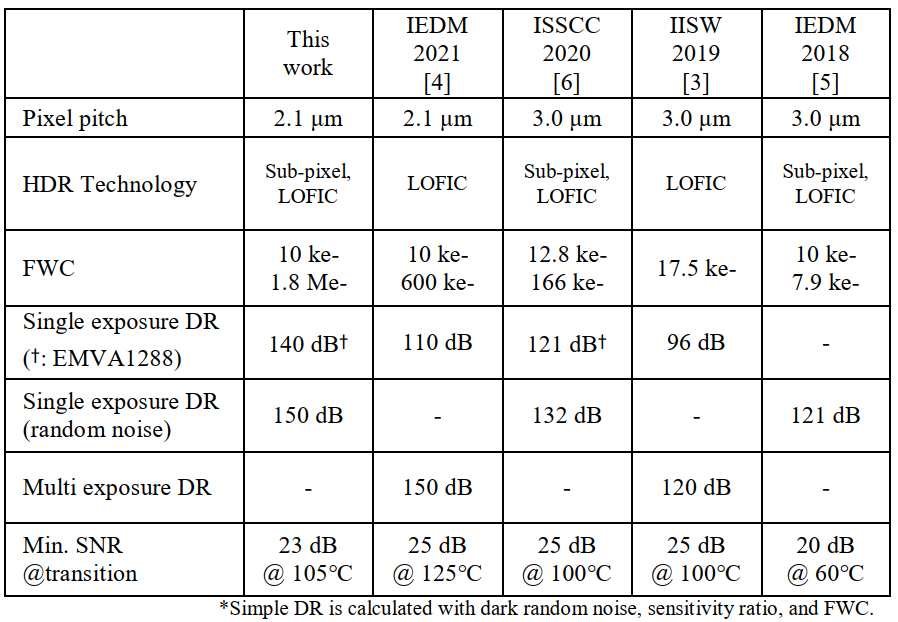
论文中前三项分别为本文工作、AR0821以及IMX490(笔者估计)。可以发现即使是2.1μm的像素,有效FWC和单次曝光DR也达到了最佳值,在105°C的信噪比接近23dB。同时,FWC容量也相对比其他工作有了较大的提高。
这项工作的目的是将具有LFM支持的DR扩展到汽车应用中,因从开发了一个2.1μm像素,利用亚像素结构、F-DTI和DRAM电容器技术,实现了高达140 dB的单次曝光DR和0.83e-的低噪声的车载CIS传感器。
5 结束语
今天我们为大家介绍了三星在IEEE中发表的1H1的技术论文,为大家介绍了其HDR的实现原理与技术架构,希望可以给您带来对于传感器的更深的认知,喜欢的同学可以进行朋友圈分享以及点击文章在看。
另外,对论文感兴趣的同学可以follow我的Github论文仓库AdasTechPapers,公众号回复较慢,后续讲解的论文会在仓库中开源。
如果您对ADAS感兴趣,欢迎关注我的公众号、知乎、Github、CSDN等,同时发表文章中使用源码以及文章会在我的GitHub进行开源,如果您有感兴趣话题也可以后台私信。